Dynamics Harmonic Analysis of Robotic Systems: Application in Data-Driven Koopman Modeling
Abstract
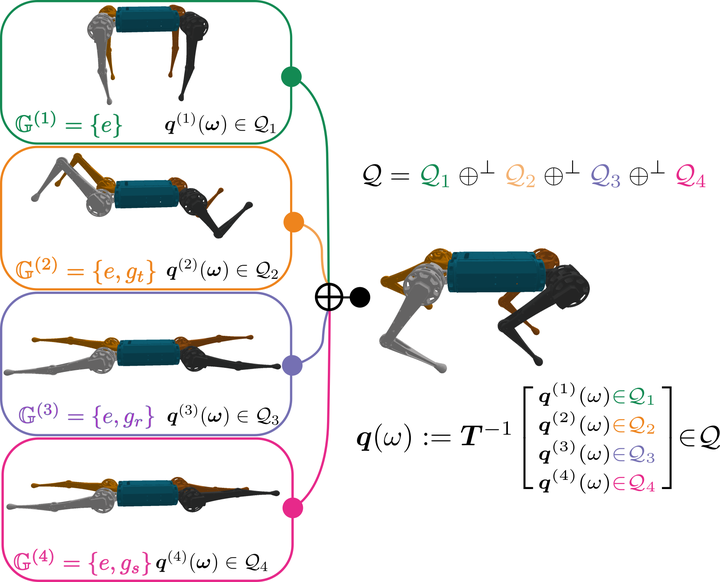
We introduce the use of harmonic analysis to decompose the state space of symmetric robotic systems into orthogonal isotypic subspaces. These are lower-dimensional spaces that capture distinct, symmetric, and synergistic motions. For linear dynamics, we characterize how this decomposition leads to a subdivision of the dynamics into independent linear systems on each subspace, a property we term dynamics harmonic analysis (DHA). To exploit this property, we use Koopman operator theory to propose an equivariant deep-learning architecture that leverages the properties of DHA to learn a global linear model of the system dynamics. Our architecture, validated on synthetic systems and the dynamics of locomotion of a quadrupedal robot, exhibits enhanced generalization, sample efficiency, and interpretability, with fewer trainable parameters and computational costs.