Abstract
System for automatically manipulating primary packaging in secondary packaging, comprising a robot having at least one robot arm with a clamping gripper installed at a tool centre point, wherein each tool centre point has a force-torque sensor, an image recording module for recording images of at least the upper segment of the primary packaging, comprising at least two stereo cameras for recording 3-D images, and one or more processors for providing a three-dimensional point cloud, controlling the image recording module and controlling the robot on the basis of the analysis of the three-dimensional point cloud and the measurements from the force-torque sensors.
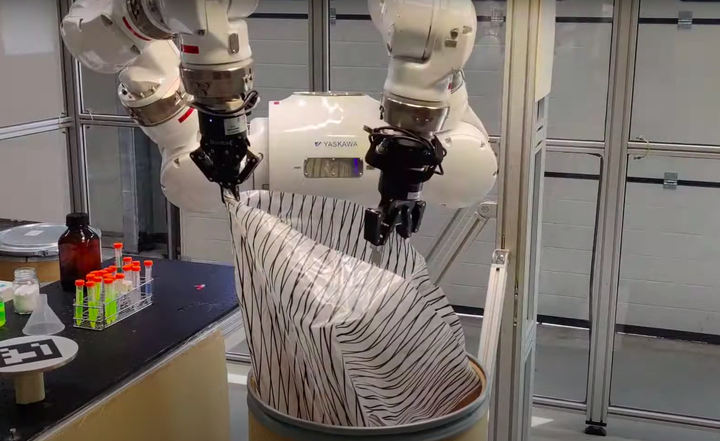
The work that I performed at INVITE under the supervision of Dr. Carl-Helmut Coulon, on robot manipulation of deformable materials with visual and force feedback, culminated in a patent application to the European Patent Office (EP4112238A1/US2023009062A1).
The following is a promotional video of the state of the project near my departure from INVITE GmbH.