Robotiq 2-Finger Grippers Controller
This is a lightweight package that I designed during my time at INVITE GmbH for the control and simulation of the 2-finger Robotiq Grippers.
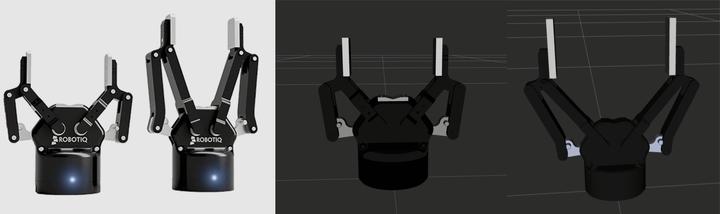
The package contains the necesary files to connect and control the Robotiq 2 finger adaptive grippers (85mm and 140mm stroke) of the C series through a USB port using the Modbus RTU communication protocol. The main contribution of this work are:
- Ease of control and programming: We use ros
actionlibAction Server/Clients to properly connect, control and command the grippers. - State update and collision avoidance: The driver updates the gripper joint position to
/joint_statetopic, enabling the planning of arm motions including finger motion with accurate collision avoidance. Additionally, this package provides collision meshes as simplified convex hulls of the visual meshes for both 85mm and 140mm stroke grippers. - Simulation of grippers operation. Previous control packages require an active connection to a real gripper to function, limiting off-line development.
- Helper functions and examples for python and C++.
Note: This package is based on waypointrobotics/robotiq_85_gripper and ros-industrial/robotiq, with many code changes and feature inclusions.
For further details see the repository

Daniel Felipe Ordoñez Apraez
Ph.D. Student
My research interests are symmetries/group theory in dynamical systems, control theory and machine learning specially fpr applications aimed to close the performance gap between nature and robotics systems in locomotion and manipulation.