Daniel Felipe Ordoñez Apraez
Ph.D. Student
Dynamic Legged Systems (DLS) & Computational Statistics and Machine Learning (CSML)
I am a Ph.D. student of the European Laboratory for Learning and Intelligent Systems (ELLIS) doctoral program under the supervision of Dr. Claudio Semini (DLS), Dr. Massimiliano Pontil (CSML), and Dr. Carlos Mastalli (RoMi). I received a Masters’s degree in Artificial Intelligence from the Universitat Politècnica de Catalunya (UPC-Barcelona Tech) and a Bachelors’s degree in Mechatronics Engineering from the Universidad Nacional De Colombia (UNAL).
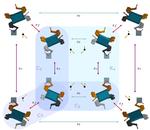
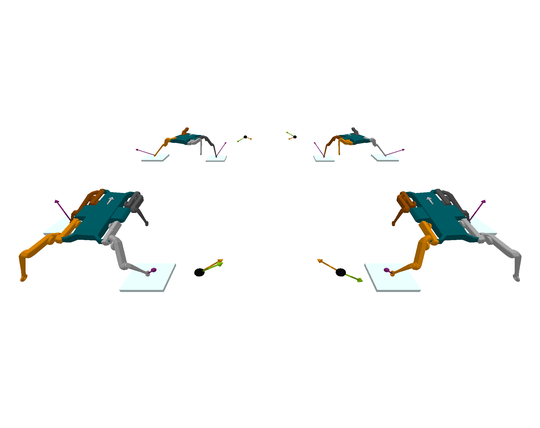
I am interested in exploiting continuous and discrete symmetries of robotic systems in machine learning applications for robotics, specially for legged locomotion control.
Do not hesitate to contact me if you are interested in doing your Bachelor’s/Master’s thesis on symmetry exploitation methods for robot learning/control, or computational design.
- Group Theory
- Geometric Learning
- Geometric Control
- Legged Locomotion
- Optimal Control
- Reinforcement Learning
-
Ph.D. Student in Bioengineering and Robotics, 2025
Istituto Italiano di Tecnologia (IIT)
-
M.Sc. in Artificial Intelligence, 2021
Universitat Politècnica de Catalunya - Barcelona Tech
-
B.Sc. in Mechatronics Engineering, 2019
Universidad Nacional de Colombia
Publications - Thesis - Patents



![[EP-Patent] Autonomous Drum and Inliner Handling](/publication/patent/featured_hu574fdfd9b300d2cabe0c3966c8acaafe_1610373_150x0_resize_lanczos_3.png)
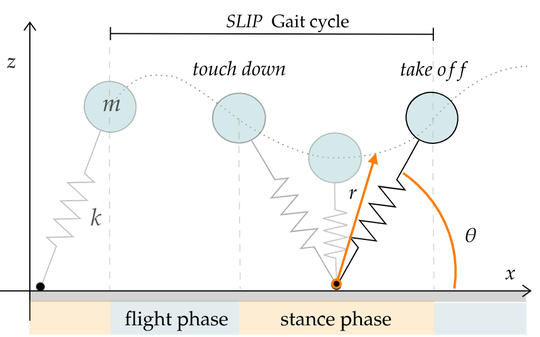
![[Master Thesis] Learning to run naturally: Guiding policies with the Spring-Loaded Inverted Pendulum](/publication/mai-thesis/featured_huefb2d7723e87d9c25cbc61206d264164_101686_150x0_resize_lanczos_3.png)
Experience
Assisted in projects of:
- Human hand motion forecasting and pose discretization for Dr.Júlia Borràs Sol
- Calibrating and pre-processing of raw sensor data from CyberGloves
- Visualization tool for pre-recorded hand motions
- Processing of KINE-ADL and study of motion trajectories and main poses using latent space obtained with a Variational Autoencoder
- Virtual avatar generation from single RGB images for Dr. Jordi Sanchez Riera
- Finetunning and extension of the VNect architecture for body parts segmentation and 3D body pose estimation
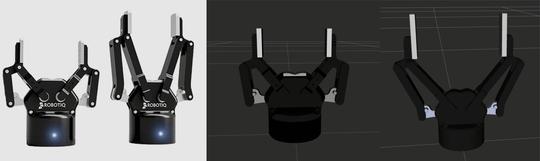
Research project: Manipulation of plastic bags (deformable materials) using a two-arm robot and 3D vision guidance. The system used multi-viewpoint stereographic cameras to detect the 3D structure of the material, infer robot grasping points, and plan and execute robot manipulations to reach the target material topology.
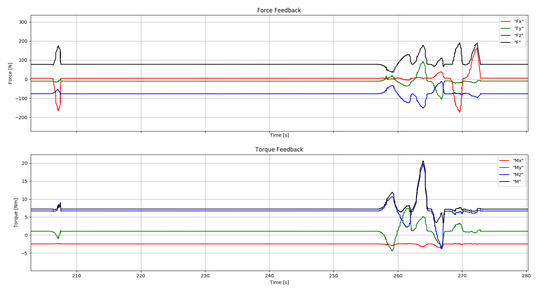
I worked in the manipulation system for handling deformable materials, using a two-arm industrial robot, 3th-party vision guidance, and force feedback. Additionally, I participated in the designing and construction of robot vacuum grippers for plastic bag manipulation and automation of robot tasks for a biotechnology laboratory, force/torque feedback.
Courses tutored:
- Data structures and algorithms
- Numerical methods
- Control theory
- Object-oriented programming
- Basic programming
Public Projects

geometry_msgs/WrenchStamped and geometry_msgs/Wrench messages coming from any 6DoF force torque sensor.
Contact
- daniel.ordonez@upc.edu
- +34 602 639 662
- Parc Tecnològic de Barcelona. C/ Llorens i Artigas 4-6, Barcelona, 08028
- Perception and Manipulation Lab (IRI)